Articole
O problemă propusă de mine și de mateiUNU
Mihnea trăiește pe o planetă de dimensiunea n x n, cu linii și coloane enumerate de la 1 la n. Spunem că celula (l, c) este intersecția liniei l cu coloana c. Fiecare celulă de pe planetă este fie pământ, fie apă.
Pentru a-l ajuta pe Mihnea, intenționezi să creezi cel puțin un tunel. Tunelul îi va permite lui Mihnea să călătorească liber între cele două puncte extreme ale tunelului. Într-adevăr, crearea unui tunel este un efort mare: costul creării unui tunel între celulele (l1, c1) și (l2, c2) este (l1 – l2) ^ 2 + (c1 – c2) ^ 2.
Cerința
Pentru moment, sarcina ta este să găsești costul minim de a crea câteva tuneluri astfel încât Mihnea să poată călători de la (l1,c1) la (l2,c2). Dacă nu trebuie creat niciun tunel, costul este 0.
Date de intrare
In fisierul de intrare mihneapolis.in, prima linie conține un număr întreg n (1 ≤ n ≤ 50) — dimensiunea planetei.
A doua linie conține două numere întregi separate prin spațiu l1 și c1 (1 ≤ l1, c1 ≤ n) – indicând celula în care locuiește Mihnea.
A treia linie conține două numere întregi separate prin spațiu l2 și c2 (1 ≤ l2, c2 ≤ n) – indicând celula în care Mihnea dorește să meargă.
Fiecare dintre următoarele n linii conține un șir de n caractere. Al j-lea caracter de pe linia i reprezintă tipul de celulă de la coordonata (i, j) (1 este teren, 0 este apă).
Este garantat că (l1, c1) și (l2, c2) sunt celule de teren.
Date de ieșire
In fișierul mihneapolis.out, afișați un număr întreg care reprezintă costul minim de creare a câteva tuneluri, astfel încât Mihnea să poată călători de la (l1,c1) la (l2,c2).
Exemplu
mihneapolis.in
5 1 1 5 5 00001 11111 00111 00110 00110
mihneapolis.out
10
Problemă propusă de @My_Life_Is_Not_Life și @mateiUNU
 Stoica Mihnea Teodor (My_Life_Is_Not_Life)
Stoica Mihnea Teodor (My_Life_Is_Not_Life) Algoritmul lui Kruskal
Considerăm un graf neorientat ponderat (cu costuri) conex G. Se numește arbore parțial un graf parțial al lui G care este arbore. Se numește arbore parțial de cost minim un arbore parțial pentru care suma costurilor muchiilor este minimă.
Dacă graful nu este conex, vorbim despre o pădure parțială de cost minim.
Algoritmul lui Kruskal permite determinarea unui arbore parțial de cost minim (APM) într-un graf ponderat cu N noduri.
Descrierea algoritmului
Pentru a determina APM-ul se pleacă de la o pădure formată din N subarbori. Fiecare nod al grafului reprezintă inițial un subarbore. Aceștia vor fi reuniți succesiv prin muchii, până când se obține un singur arbore (dacă graful este conex) sau până când acest lucru nu mai este posibil (dacă graful nu este conex).
Algoritmul este:
- se ordonează muchiile grafului crescător după cost;
- se analizează pe rând muchiile grafului, în ordinea crescătoare a costurilor;
- pentru fiecare muchie analizată:
- dacă extremitățile muchiei fac parte din același subarbore, muchia se ignoră
- dacă extremitățile muchiei fac parte din subarbori diferiți, aceștia se vor reuni, iar muchia respectivă face parte din APM.
Principala dificultate în algoritmul descris mai sus este stabilirea faptului că extremitățile muchiei curente fac sau nu parte din același subarbore. În acest scop vom stabili pentru fiecare subarbore un nod special, numit reprezentant al (sub)arborelui și pentru fiecare nod din graf vom memora reprezentantul său (de fapt al subarborelui din care face parte) într-un tablou unidimensional.
Pentru a stabili dacă două noduri fac sau nu parte din același subarbore vom verifica dacă ele au același reprezentant. Pentru a reuni doi subarbori vom înlocui pentru toate nodurile din subarborele B cu reprezentantul subarborelui A.
Înlocuirile descrise mai sus sunt simple dar lente. Pentru o implementare mai eficientă a algoritmului se poate folosi conceptul de Padure de mulțimi disjuncte, descris în acest articol.
Exemplu
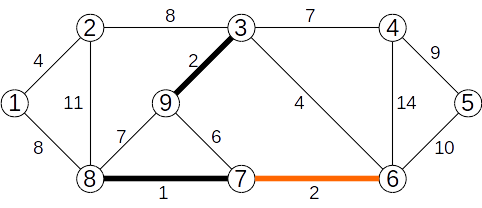
Vom determina, folosind Algoritmul lui Kruskal, arborele parțial de cost minim pentru graful de mai jos.
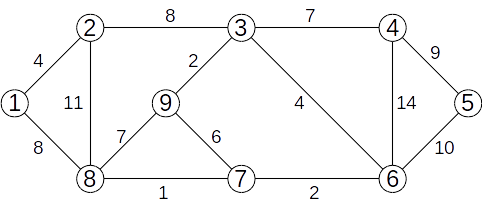
Muchiile se vor analiza în ordinea crescătoare a costului.
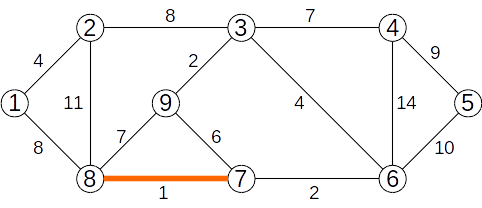
Se adaugă muchia (7,8) de cost 1
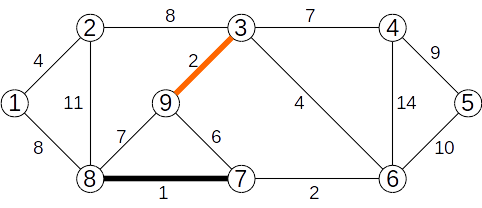
Se adaugă muchia (3,9) de cost 2
Se adaugă muchia (6,7) de cost 2
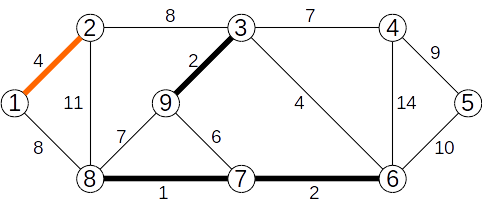
Se adaugă muchia (1,2) de cost 4
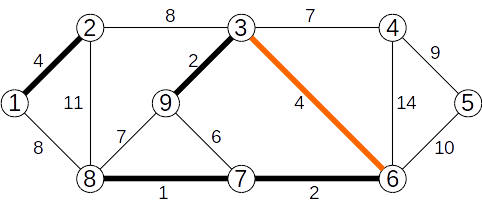
Se adaugă muchia (3,6) de cost 1
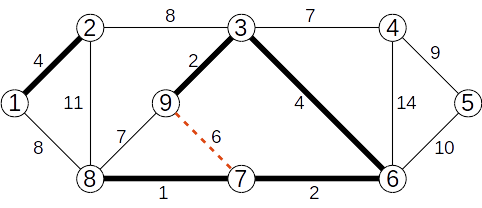
Se ignoră muchia (7,9) de cost 6
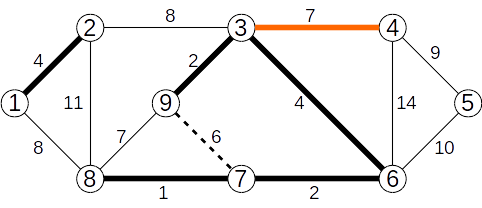
Se adaugă muchia (3,4) de cost 7
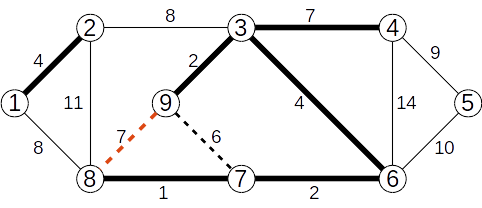
Se ignoră muchia (8,9) de cost 7
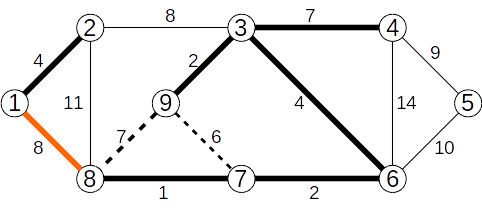
Se adaugă muchia (1,8) de cost 8
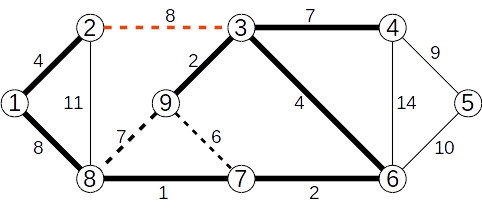
Se ignoră muchia (2,3) de cost 8
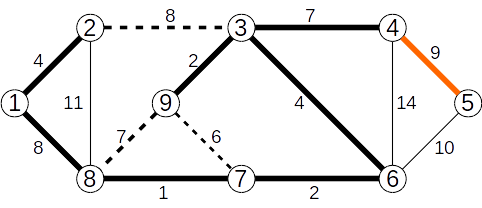
Se adaugă muchia (4,5) de cost 9
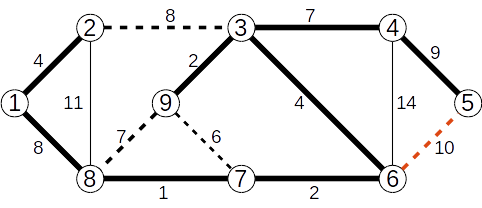
Se ignoră muchia (5,6) de cost 10
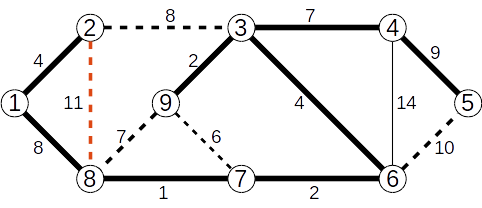
Se ignoră muchia (2,8) de cost 11
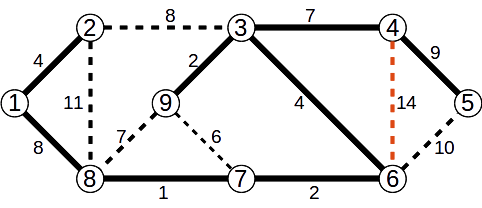
Se ignoră muchia (4,6) de cost 14
Vom determina, folosind Algoritmul lui Kruskal, arborele parțial de cost minim pentru graful de mai jos:
Muchiile se vor analiza în ordinea următoare:
| 1. | |
Se adaugă muchia (7,8) de cost 1 |
| 2. | |
Se adaugă muchia (3,9) de cost 2 |
| 3. | |
Se adaugă muchia (6,7) de cost 2 |
| 4. | |
Se adaugă muchia (1,2) de cost 4 |
| 5. | |
Se adaugă muchia (3,6) de cost 1 |
| 6. | |
Se ignoră muchia (7,9) de cost 6 |
| 7. | |
Se adaugă muchia (3,4) de cost 7 |
| 8. | |
Se ignoră muchia (8,9) de cost 7 |
| 9. | |
Se adaugă muchia (1,8) de cost 8 |
| 10. | |
Se ignoră muchia (2,3) de cost 8 |
| 11. | |
Se adaugă muchia (4,5) de cost 9 |
| 12. | |
Se ignoră muchia (5,6) de cost 10 |
| 13. | |
Se ignoră muchia (2,8) de cost 11 |
| 14. | |
Se ignoră muchia (4,6) de cost 14 |
Secvență C++
Următoarea secvență determină costul total al APM-ului, folosind algoritmul lui Kruskal. Presupunem că graful are cel mult 100 de noduri.
struct muchie{
int i,j,cost;
};
int n , m , t[101];
muchie x[5000];
int main()
{
cin >> n >> m;
for(int i = 0 ; i < m ; ++i)
cin >> x[i].i >> x[i].j >> x[i].cost;
//sortare tablou x[] după campul cost
// ... de completat
//initializare reprezentanti
for(int i =1 ; i <= n ; ++i)
t[i] = i;
//determinare APM
int S = 0;
for(int i = 0 ; i < m ; i ++)
if(t[x[i].i] != t[x[i].j]) // extremitatile fac parte din subrabori diferiti
{
S += x[i].cost;
//reunim subarborii
int ai = t[x[i].i], aj = t[x[i].j];
for(int j =1 ; j <= n ; ++j)
if(t[j] == aj)
t[j] = ai;
}
cout << S << "\n";
return 0;
}
Vezi și
 Candale Silviu (silviu)
Candale Silviu (silviu) Tare conexitate
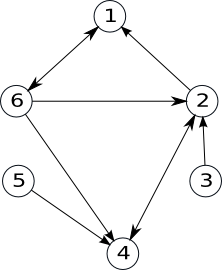
Un graf orientat G=(V,E) este tare conex dacă pentru orice pereche de noduri distincte (x,y) există cel puțin un drum de la x la y și există cel puțin un drum de la y la x.
Pentru un graf orientat, se numește componentă tare conexă un subgraf tare conex maximal – prin adăugarea a încă unui nod, subgraful obținut nu mai este tare conex.
Exemplu
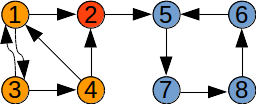
Graful de mai sus nu este tare conex. El are trei componente tare conexe.
Verificarea tare conexității. Determinarea componentelor tare conexe
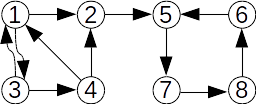
Verificare tare conexității unui graf orientat poate fi privită ca un caz particular al determinării componentelor tare conexe, deoarece, dacă graful are o singură componentă tare conexă atunci el este tare conex. În continuare vom vedea două metode de determinare a componentelor tare conexe. Ambele folosesc noțiunea de graf transpus, pe care o definim în continuare:
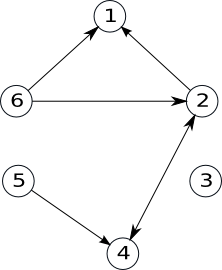
Definiție: Fie G=(V,E) un graf orientat. Se numește graf transpus al lui G graful orientat GT=(V,ET), cu aceeași mulțimea a nodurilor și pentru orice pereche de noduri are loc: (x,y) este arc în G dacă și numai dacă (y,x) este arc în GT.
Exemplu
| Graf orientat inițial | Graful orientat transpus |
 |
|
Să observăm că pentru două noduri oarecare x, y:
- existența unui drum de la
xlaypoate fi determinată cu o parcurgere (de exemplu în adâncime) în grafulG, pornind din nodulx; - existența unui drum de la
ylaxpoate fi determinată cu o parcurgere în grafulGT, pornind tot din nodulx.
Algoritmul Plus-Minus
Folosind observații de mai sus, pentru a determina componentele tare conexe folosim următorul algoritm, numit Plus-Minus:
- pentru fiecare nod
xal grafului care încă nu a fost plasat într-o componentă tare conexă:- determinăm toate nodurile în care se poate ajunge din
x, folosind grafulGși le marcăm într-un tablou cu plus; - determinăm toate nodurile din care se poate ajunge în
x, folosind grafulGTși le marcăm într-un tablou cu minus; - nodurile marcate atât cu plus, cât și cu minus, împreună cu
xformează o componentă tare conexă;
- determinăm toate nodurile în care se poate ajunge din
Exemplu:
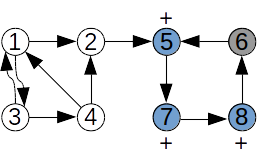
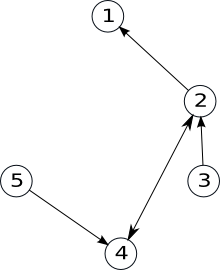
Fie graful de mai sus. Să determinăm componenta tare conexă din care face parte nodul 6:
| Graful inițial | Graful transpus |
 |
|
S-au marcat cu plus nodurile: 5 7 8 |
S-au marcat cu minus nodurile: 1 2 3 4 5 7 8 |
Nodurile marcate de două ori, 5 7 8, împreună cu nodul inițial, 6, formează o componentă tare conexă.
Secvență C++:
n, a[][]– numărul de noduri și matricea de adiacențănrc– numărul de componente tare conexectc[]– tablou pentru memorarea componentelor tare conexe:ctc[i] =numărul de ordine al componentei din care face parte nodulis[], p[]– tablouri pentru marcarea nodurilor vizitate în timpul parcurgerilor- să observăm că graful inițial și cel transpus pot fi memorate prin aceeași matrice de adiacență
void df1(int x)
{
s[x] = 1;
for(int i =1 ; i <= n ; i ++)
if(s[i] == 0 && a[x][i] == 1)
df1(i);
}
void df2(int x)
{
p[x] = 1;
for(int i =1 ; i <= n ; i ++)
if(p[i] == 0 && a[i][x] == 1)
df2(i);
}
int main()
{
.....
for(int i = 1 ; i <= n ; ++i)
if(ctc[i] == 0)
{
for(int j = 1; j <= n ; ++j)
s[j] = p[j] = 0;
nrc ++;
df1(i); df2(i);
for(int j = 1; j <= n ; ++j)
if(s[j] == 1 && p[j] == 1)
ctc[j] = nrc;
}
....
}
Algoritmul lui Kosaraju
Alt algoritm, mai eficient, pentru determinarea componentelor tare conexe este Algoritmul lui Kosaraju.
Să ne amintim că la parcurgerea în adâncime se pot asocia nodurilor două momente de timp:
d[x]– momentul când nodulxeste descoperit și adăugat pe stivă: timpul de descoperire a noduluif[x]– momentul când se termină de vizitat succesorii luix, iar nodulxse elimină de pe stivă: timpul de finalizare a nodului
Aceste momente de timp vor fi numere naturale între 1 și 2*n, unde n este numărul de noduri din graf.
Algoritmul lui Kosaraju este:
- determinăm graful transpus
GT - parcurgem în adâncime graful și determinăm pentru fiecare nod
xtimpul de finalizaref[x] - parcurgem în adâncime graful transpus
GT, dar considerăm nodurile în ordinea descrescătoarea timpilor de finalizare - nodurile din arborii de parcurgere obținuți reprezintă câte o componentă tare conexă
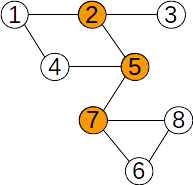
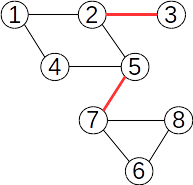
Exemplu:
| Graf orientat inițial | Graful orientat transpus |
| |
|
În urma parcurgerii în adâncime a grafului inițial G nodurile în ordinea finalizării sunt: 
Parcurgem graful transpus GT analizând nodurile în ordinea inversă a timpilor de finalizare:
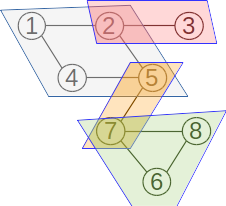
- începem cu nodul
1; se vizitează nodurile3 4; se determină componenta tare conexă{1,3,4}; - continuăm cu nodul
2(nodurile1,3și4au fost vizitate mai devreme); nu se vizitează alte noduri; se determină componenta tare conexă{2}; - continuăm cu nodul
5; se vizitează nodurile6 8 7; se determină componenta tare conexă{5, 6, 7, 8}.
![]()
Secvență C++:
#include <iostream>
#include <fstream>
#include <vector>
using namespace std;
vector<vector<int> > G, GT;
int n , m , contor , nrs;
vector<bool> V;
vector<int> S;
void read()
{
cin >> n >> m;
G = GT = vector<vector<int>>(n + 1);
for(int i = 1 ; i <= m ; i++)
{
int a , b;
cin >> a >> b;
G[a].push_back(b);
GT[b].push_back(a);
}
}
void dfs(int k)
{
V[k] = true;
for(auto x : G[k])
if(!V[x])
dfs(x);
S.push_back(k);
}
void dfsGT(int k)
{
V[k]=1;
for(auto x: GT[k])
if(! V[x])
dfsGT(x);
}
int main()
{
read();
V = vector<bool> (n + 1, false);
for(int i = 1 ; i <= n ; i ++)
if(! V[i])
dfs(i);
V = vector<bool> (n + 1, false);
for(vector<int>::reverse_iterator it = S.rbegin() ; it != S.rend() ; it ++)
if(!V[*it]) {
contor ++;
dfsGT(*it);
}
cout<<contor;
return 0;
}
Complexitatea acestui algoritm este aceea a parcurgerii în adâncime: O(n2) dacă memorăm graful prin matricea de adiacență, O(n+m) dacă memorăm graful prin liste de adiacență.
Biconexitate
Fie G=(V,E) un graf neorientat conex:
- un nod al grafului se numește punct de articulație sau nod critic dacă subgraful obținut prin eliminarea lui nu este conex;
- o muchie se numește punte sau muchie critică dacă graful parțial obținut prin eliminarea ei nu este conex;
- un graf neorientat se numește biconex dacă nu conține puncte de articulație;
- se numește componentă biconexă un subgraf biconex maximal – prin adăugarea încă unui nod nu mai este biconex.
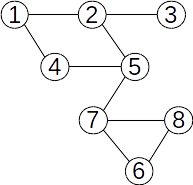
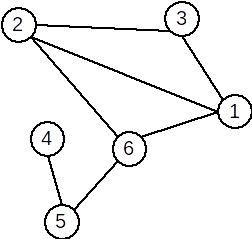
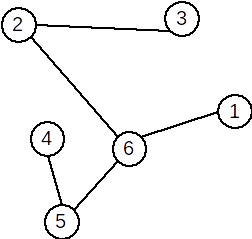
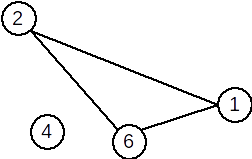
Exemplu:
| Graful inițial | Puncte de articulație | Punți | Componente biconexe |
 |
 |
 |
 |
Câteva observații:
- pentru fiecare muchie critică, cel puțin o extremitate este punct de articulație;
- fiecare punct de articulație face parte din cel puțin două componente biconexe;
- nodurile care fac parte dintr-un ciclu aparțin aceleiași componente biconexe;
- fiecare muchie critică reprezintă ea însăși o componentă biconexă;
- o muchie este critică dacă nu face parte dintr-un ciclu;
Pentru a determina punctele de articulație și punțile se poate folosi un algoritm naiv, bazat pe eliminarea succesivă a câte unui nod (muchie) și verificarea conexității. Complexitatea acestor algoritmi este O(n*C), respectiv O(m*C), unde O(C) este complexitatea algoritmului de verificarea a conexității (O(n*n) dacă reprezentăm graful prin matrice de adiacență, O(n+m) dacă reprezentăm graful prin liste de adiacențe).
În cele ce urmează vom prezentat un algoritm bazat pe parcurgerea în adâncime a grafului. Complexitatea sa este aceeași cu a parcurgerii în adâncime.
Considerăm G=(V,E) graful dat și A arborele de parcurgere în adâncime. Reamintim că muchiile graful pot fi doar:
- muchii de parcurgere, folosite la înaintarea în arbore
- muchii de întoarcere; o muchie
(k,x)este de întoarcere dacăxeste ascendent al luikîn arboreleA– nodulxa fost descoperit anterior noduluik
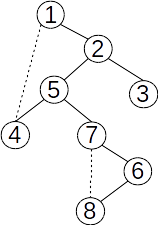
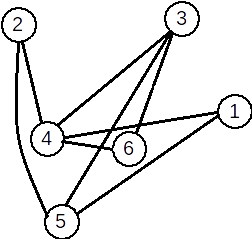
Pentru graful de mai sus, arborele de parcurgere este următorul – muchiile de parcurgere sunt desenate cu linii continue, cele de întoarcere cu linii întrerupte.
Observăm următoarele:
- un nod
kal grafului, diferit de rădăcina arborelui DFS, este punct de articulație dacă și numai dacă are un descendent directxîn arboreleAcu proprietatea că de la niciun descendent al luixsau de laxnu există muchie de întoarcere la niciun ascendent al luik; - rădăcina arborelui DFS este punct de articulație dacă și numai dacă are în acest arbore cel puțin doi descendenți direcți.
Pentru a determina punctele de articulație, punțile și componentele biconexe vom determina pentru fiecare nod k următoarele informații:
nivel[k]– nivelul pe care se află nodulkîn arborele DFS;nivel[rădăcină] = 1;nivel[k] = nivel[tata[k]] + 1;
nma[k]– nivelul minim la care se poate ajunge dink, mergând numai pe muchii de arbore și folosind ca ultimă muchie o muchie de întoarcere. Îl vom numi nivelul minim accesibil și este egal cu minimul dintre următoarele 3 valori :- nivelul nodului curent
- minimul dintre nivelurile nodurilor cu care este legat nodul curent printr-o muchie de întoarcere
- minimul dintre nivelurile minime accesibile ale fiilor nodului curent din cadrul arborelui DFS
Pentru graful de mai sus aceste valori sunt următoarele:
k |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
nivel[k] |
1 |
2 |
3 |
4 |
3 |
5 |
4 |
6 |
nma[k] |
1 |
1 |
3 |
1 |
1 |
4 |
4 |
4 |
Cu ajutorul acestor valori, un nod k care nu este rădăcina arborelui este punct de articulație dacă și numai dacă are cel puțin un fiu x pentru care nivelul minim accesibil este mai mare sau egal cu nivelul nodului (nivel[k] <= nma[x]). Să analizăm nodurile:
1nu este punct de articulație, deoarece este rădăcina arborelui și are un singur descendent direct2este punct de articulație, deoarece3este fiu al lui2șinivel[2] <= nma[3]3nu este punct de articulație, deoarece nu are niciun fiu4nu este punct de articulație, deoarece nu are niciun fiu5este punct de articulație deoarece7este fiu al lui5șinivel[5] <= nma[7]6nu este punct de articulație; pentru singurul fiu al lui6,8relația estenivel[6] > nma[8]7este punct de articulație deoarece6este fiu al lui7șinivel[7] <= nma[6]8nu este punct de articulație deoarece nu are fii
Fie (k,x) o muchie de arbore, în care k este tatăl lui x. Această muchie este critică dacă și numai dacă (nivel[k] < nma[x]). Muchiile de întoarcere nu sunt niciodată muchii critice, deoarece aparțin întotdeauna unor cicluri.
Cele două șiruri de valori se construiesc în timpul parcurgerii DFS. Fie k nodul curent în parcurgerea DFS:
- stabilim
nivel[k] = nivel[tata[k]] + 1– această valoare va rămâne neschimbată până la final; - inițializăm
nma[k] = nivel[k] - parcurgem nodurile adiacente cu
k. Fiexun asemenea nod:- dacă
xa fost deja parcurs și nu este tatăl luik, muchia(k,x)este muchie de întoarcere. Dacă este cazul actualizămnma[k]la valoareanivel[x](dacănivel[x]este mai mic decât valoarea actuală a luinma[k]); - dacă
xnu a fost încă parcurs, continuăm parcurgerea dinx– îl adăugăm pe stivă/apel recursiv. La eliminarea de pe stivă/ revenirea din autoapel, actualizăm valoareanma[k]la valoareanma[x](dacănma[k]este mai mare decâtnma[x], acesta din urmă este calculat deja)
- dacă
Următorul pseudocod descrie cum se calculează pentru fiecare nod al grafului nivelul și nivelul minim accesibil, folosind parcurgerea în adâncime:
subprogram DFS(k, tata)
V[k] ← true
nivel[k] ← nivel[tata] + 1
nma[k] ← nivel[k]
pentru x - nod adiacent cu k
dacă x ≠ tata
dacă V[x] = true atunci
dacă nma[k] > nivel[x] atunci
nma[k] ← nivel[x]
sf_dacă
altfel
DFS(x,k)
dacă nma[k] > nma[x] atunci
nma[k] ← nma[x]
sf_dacă
// determinare puncte de articulație
// determinare punți
// determinare componente biconexe
sf_dacă
sf_dacă
sf_pentru
sf_subprogram
Pentru a determina punctele de articulație:
- la eliminarea de pe stivă a nodului
x(revenirea din autoapel) verificăm dacă acest și nodul părintekverifică relațianivel[k] <= nma[x]; în caz afirmativ, decidem că nodulkeste critic; - pentru a stabili dacă rădăcina este punct de articulație trebuie să-i numărăm descendenții direcți în arbore.
- Observație: un punct de articulație poate fi descoperit de mai multe ori – dacă există mai mulți fii ai săi care respectă relația de mai sus.
//determinare puncte de articulație
dacă nivel[k] ≤ nma[x] și nod ≠ rădăcină atunci
//nodul k este punct de articulație
sf_dacă
Pentru a determina punțile:
- la eliminare de pe stivă a nodului
x/revenirea din autoapel vom determina muchiile de parcurgere(k,x)pentru care nivelul luikeste mai mic decât nivelul minim accesibil al luix:nivel[k] < nma[x].
//determinare punți
dacă nivel[k] < nma[x] atunci
//muchia (k,x) este punte
sf_dacă
Pentru a determina componentele biconexe:
- utilizăm o stivă suplimentară
S, pe care adaugăm noduri la vizitarea lor conform parcurgerii și le eliminăm la determinarea unei componente biconexe;- ordinea nodurilor din stiva
Seste cea a parcurgerii în adâncime;
- ordinea nodurilor din stiva
- dacă pentru nodul curent
kavem un descendent directxpentru carenivel[k] <= nma[x], vom elimina de pe stivă nodurile până la nodulx, inclusiv acesta;- nodurile eliminate, împreună cu nodul
kreprezintă o componentă biconexă; - eliminarea se face până la
x, nu până lak, deoarece între acestea, pe stivă, pot fi noduri din altă componentă biconexă.
- nodurile eliminate, împreună cu nodul
- Observație: condiția
nivel[k] <= nma[x]are loc întotdeauna pentru rădăcina arborelui DFS, chiar dacă acesta nu este punct de articulație. În acest caz se determină o componentă biconexă din care face rădăcina. Acest lucru se întâmplă și când graful dat este biconex: determinarea componentei biconexe se face la revenirea în rădăcină.
...
V[k] ← true
Adaugă(S,k)
....
//determinare componente biconexe
dacă nivel[x] ≤ nma[k] atunci
câttimp Vârf(S) ≠ x execută
Vârf(S) se adugă la componenta curentă
Elimină(S)
sf_câttimp
x se adaugă la componenta curentă
Elimină(S)
k se adaugă la componenta curentă
sf_dacăAlgoritmul Roy-Warshall-Floyd
În jurul anului 1960 a fost descoperit un algoritm pentru drumuri în grafuri orientate. Descoperirea a fost făcută independent de către trei oameni de stiință în domeniul algoritmilor: Robert Floyd, Bernard Roy și Stephen Warshall.
Algoritmul se regăsește sub diferite denumiri care conțin numele descoperitorilor, este bazat pe programarea dinamică și poate fi utilizat în următoarele două moduri:
- pentru un graf orientat oarecare determină matricea drumurilor – stabilește despre oricare două noduri
x ydacă există drum de laxlay– este de regulă cunoscut sub numele Roy-Warshal - pentru un graf orientat ponderat (cu costuri) – determină pentru fiecare pereche de noduri costul minim al unui drum cu extremitățile în acele noduri – este de regulă cunoscut sub numele Roy-Floyd
Ambele variante permit și reconstituirea unor drumuri între două noduri date.
Graf eulerian
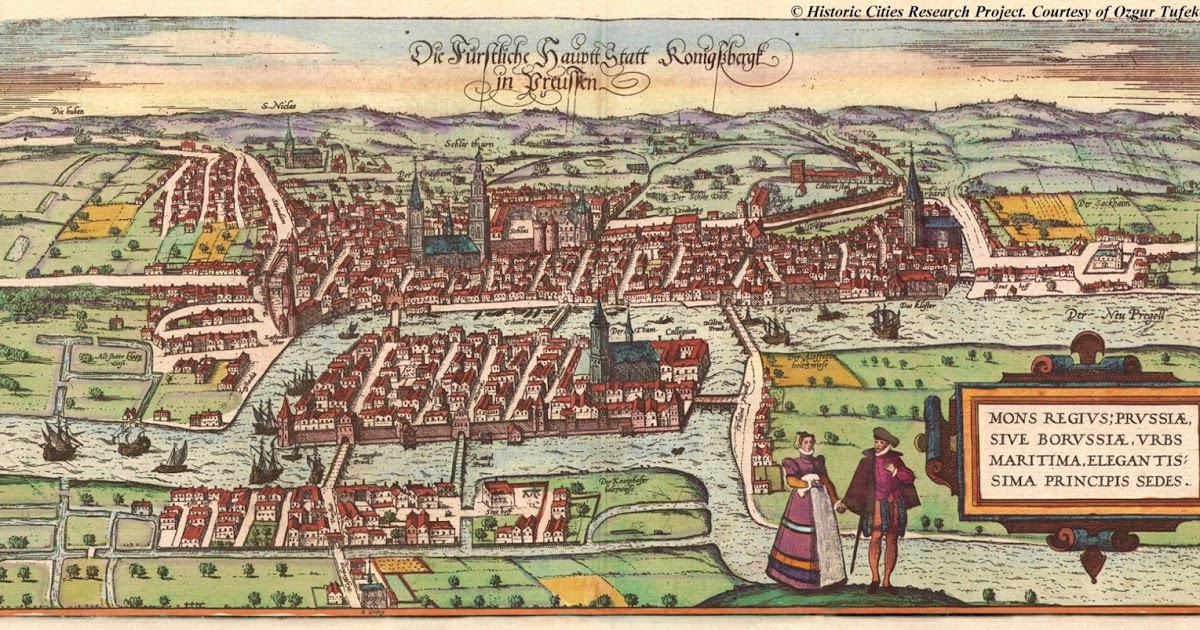
În 1736, matematicianul elvețian Leonard Euler a rezolvat o problemă cunoscută astăzi ca “Problema celor șapte poduri din Königsberg”. Prin orașul Königsberg, azi Kaliningrad trece un râu pe care sunt două insule, acestea și malurile fiind unite prin poduri ca în imaginea de mai jos.
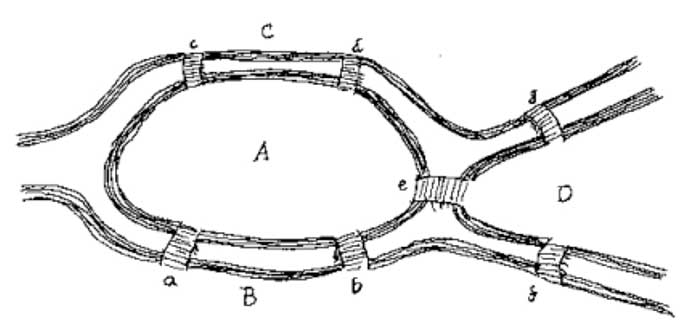
Leonard Euler a demonstrat că nu este posibil ca o persoană să traverseze fiecare pod o singură dată. În onoarea sa, o categorie specială de grafuri se numesc grafuri euleriene.
Definiții:
- Într-un graf neorientat, se numește lanț eulerian un lanț simplu în care apare fiecare muchie (fiind lanț simplu, fiecare muchie apare o singură dată).
- Într-un graf neorientat, se numește ciclu eulerian un ciclu în care apare fiecare muchie.
- Un graf neorientat se numește graf eulerian dacă conține un ciclu eulerian.
Exemplu:
În graful de mai sus ciclul (1 2 4 5 3 6 5 2 3 1) este eulerian.
Teoremă:
Un graf neorientat fără vârfuri izolate este eulerian dacă și numai dacă este conex și toate vârfurile au grad par.
Un graf neorientat fără vârfuri izolate conține un lanț eulerian, dacă și numai dacă este conex și toate vârfurile au grad par, mai puțin două. Aceste vârfuri vor fi extremitățile lanțului eulerian.
Pentru determinarea unui ciclu eulerian se pot folosi mai mulți algoritmi. Unul dintre aceștia este asemănător cu parcurgerea în adâncime. Vom folosi o stivă (eventual memoria STACK prin intermediul recursivității):
- adăugăm pe stivă un vârf oarecare – de exemplu
1; - cât timp stiva nu este vidă
- fie
k– nodul din vârful stivei - determinăm nodurile
xadiacente cuk. Eliminăm muchia[k,x]și adăugăm nodulxpe stivă (apel recursiv)- continuăm cu nodul situat în vârful stivei
- adăugăm nodul
kîntr-o listă - eliminăm nodul
kdin stivă
- fie
- lista construită reprezintă ciclu eulerian
Important:
- la vizitarea unui vârf, acesta nu va fi marcat, pentru a permite revenirea în el;
- finitudinea algoritmului este asigurată de faptul că muchiile se elimină din graf;
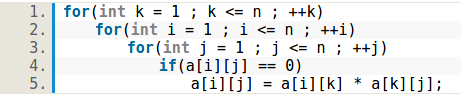
Secvență C++:
Considerăm un graf cu n vârfuri, memorat prin intermediul matricei de adiacență, A[][]. Tabloul L[] reprezintă lista în care se memorează ciclul eulerian. Toate variabilele sunt globale:
void Euler(int k)
{
for(int i = 1 ; i <= n ; i ++)
if(A[k][i] == 1)
{
A[k][i] = A[i][k] = 0;
Euler(i);
}
L[++p] = k;
}
...
Euler(1);
...
Algoritmul de mai sus poate fi utilizat și pentru determinarea unui lanț eulerian. Parcurgerea trebuie să înceapă însă din unul dintre vârfurile cu grad impar.
Graf hamiltonian
Problema comis voiajorului este o problemă celebră de informatică: Un comis-voiajor (agent comercial) trebuie să viziteze n orașe. Cunoscându-se șoselele existente între orașe, să se determine o modalitate (toate modalitățile) prin care comis-voiajorul poate parcurge fiecare oraș o singură dată și se întoarce în orașul de plecare.
Dacă asociem problemei un graf neorientat, constatăm că trebuie să determinăm un ciclu elementar (toate ciclurile elementare) care trece prin toate vârfurile grafului. Un astfel de ciclu se numește ciclu hamiltonian.
Definiții:
- Într-un graf neorientat, se numește lanț hamiltonian un lanț elementar care conține toate vârfurile grafului.
- Într-un graf neorientat, se numește ciclu hamiltonian un ciclu elementar care conține toate vârfurile grafului.
- Un graf neorientat se numește graf hamiltonian dacă conține un ciclu hamiltonian.
Pentru un graf orientat se pot definii noțiuni similare, de drum hamiltonian și circuit hamiltonian
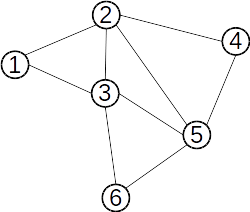
Exemplu:
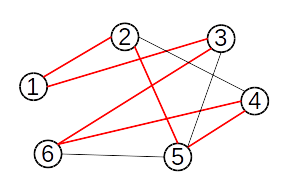
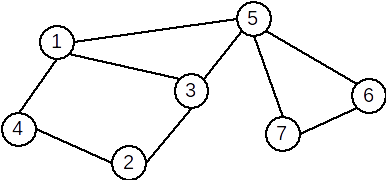
În graful de mai sus sunt evidențiate muchiile care fac parte dintr-un ciclu hamiltonian: (1, 2, 5, 4, 6, 3).
În anumite condiții se poate stabili că un graf dat este hamiltonian. Dar aceste condiții sunt “de suficiență”. Dacă nu sunt îndeplinite, nu înseamnă că graful nu este hamiltonian!
Teoreme:
- Fie
G=(X,U)un graf neorientat cu \( n \) vârfuri și un lanț hamiltonian \( v_1, v_2, \cdots, v_n \). Dacă \( d(v_1) + d(v_n) \geq n\), atunci graful este hamiltonian, unde \( d(x) \) este gradul vârfului \(x \). - Fie
G=(X,U)un graf neorientat cu \( n \) vârfuri. Dacă pentru orice pereche de vârfuri neadiacente distincte \( v_i, v_j \) avem relația \( d(v_i) + d(v_j) \geq n\), atunci graful este hamiltonian. - Un graf neorientat în care gradul fiecărui vârf este mai mare sau egal cu jumătate din numărul de vârfuri este hamiltonian.
- Un graf complet cu \(n > 2\) vârfuri conține \(\frac{(n-1)!}{2}\) cicluri hamiltoniene.
Algoritmul lui Prim
Considerăm un graf neorientat ponderat (cu costuri) conex G. Se numește arbore parțial un graf parțial al lui G care este arbore. Se numește arbore parțial de cost minim un arbore parțial pentru care suma costurilor muchiilor este minimă.
Dacă graful nu este conex, vorbim despre o pădure parțială de cost minim.
Algoritmul lui Prim permite determinarea unui arbore parțial de cost minim (APM) într-un graf ponderat cu N noduri.
Descrierea algoritmului
Determinarea APM-ului se face astfel:
- se stabilește un nod de plecare; acesta va fi rădăcina arborelui, care se va crea pas cu pas, prin adăugarea de noi noduri;
- în mod repetat:
- se alege un nod neadăugat încă în arborele curent pentru care muchia dintre el și un nod din arbore are cost minim;
- se adăugă nodul în arbore;
- când nu se mai poate face alegerea unui asemenea nod, fie au fost adăugate toate nodurile, fie graful nu este conex și au fost adăugate în arbore toate nodurile din componenta conexă a nodul inițial;
- dacă graful nu este conex, continuăm cu următoarea componentă conexă.
Observație: arborele parțial de cost minim al unui graf neorientat nu este unic, însă toate APM-urile vor avea același cost.
Exemplu
Mai jos este descris modul în care se aleg nodurile care se adaugă în arbore pentru un graf ponderat cu N=9 noduri:
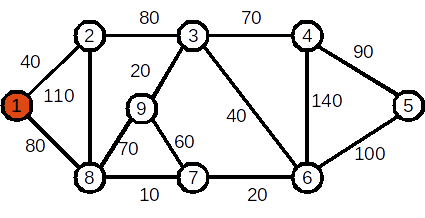
Nodul ințial este 1. Costul curent al APM este 0
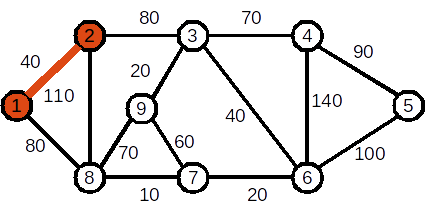
Se adaugă nodul 2. Muchia folosită este (1,2). Costul curent al APM este 40
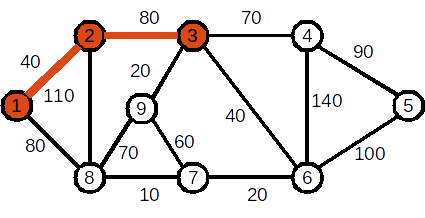
Se adaugă nodul 3. Muchia folosită este (2,3). Costul curent al APM este 120
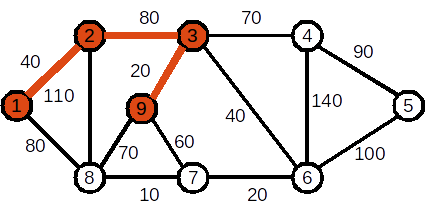
Se adaugă nodul 9. Muchia folosită este (3,9). Costul curent al APM este 140
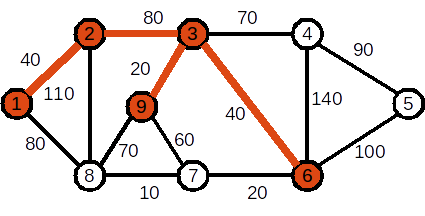
Se adaugă nodul 6. Muchia folosită este (3,6). Costul curent al APM este 180
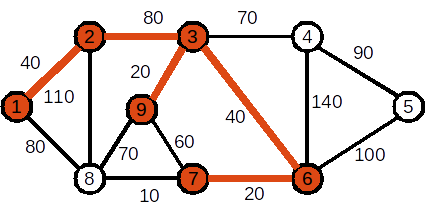
Se adaugă nodul 7. Muchia folosită este (6,7). Costul curent al APM este 200
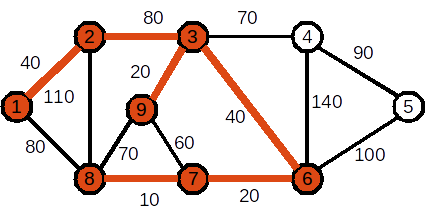
Se adaugă nodul 8. Muchia folosită este (7,8). Costul curent al APM este 210
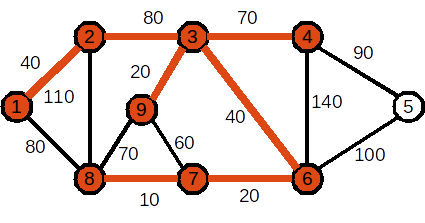
Se adaugă nodul 4. Muchia folosită este (3,4). Costul curent al APM este 280
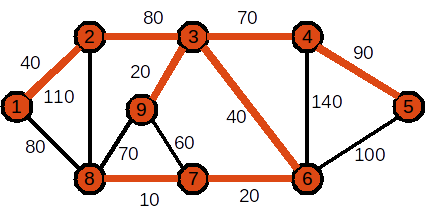
Se adaugă nodul 5. Muchia folosită este (4,5). Costul curent al APM este 370
Algoritmul poate fi implementat în mai multe moduri, cu complexități diferite.
Varianta \(N^3\)
- în mod repetat (de cel mult
N-1ori):- se aleg două noduri adiacente, un nod din arbore și un nod din afara acestuia, astfel încât muchia determinată de cele două noduri să aibă costul minim
- nodul ales din afara arborelui curent se va adăuga în arbore
Varianta \(N^2\)
Față de varianta anterioară se evită căutarea propriu zisă a nodului din arbore, căutându-se efectiv numai nodul din afara acestuia. Pentru aceasta se păstrează un șir d[] cu următoarea semnificație: pentru un nod k încă neadăugat în arbore, d[k] reprezintă costul minim al unei muchii având o extremitate k și o extremitate în arbore; dacă o asemenea muchie nu există d[k] = INFINIT.
Dacă determinarea succesivă a nodurilor din afara arborelui se face prin parcurgerea șirului d[], complexitatea devine O(N2).
Varianta \(N \log N\)
Se poate evita parcurgerea șirului d[] prin memorarea nodurilor din arbore într-o structură de date de tip heap, în vârful heap-ului fiind nodul k pentru care d[k] are valoare minimă. În acest fel complexitatea algoritmului devine O(N logN).
Vezi și
Grafuri neorientate
Grafurile au numeroase aplicații în diverse domenii: proiectarea circuitelor electrice, determinarea celui mai scurt drum dintre două localități, rețelele sociale (ex. Facebook), etc.
Primele rezultate legate de teoria grafurilor au fost obținute de matematicianul Leonard Euler, cel care a studiat Problema podurilor din Königsberg, din imaginea de mai jos. A demonstrat că problema nu are soluție, iar în onoarea lui o categorie specială de grafuri au fost numite grafuri euleriene.
Terminologie
Definiție: Se numește graf neorientat o pereche ordonată de mulțimi G=(X,U), unde:
Xeste o mulțime finită și nevidă de elemente numite vârfuri sau noduri;Ueste o mulțime finită de submulțimi cu două elemente dinX, numite muchii.
Vom nota în continuare vârfurile cu valori între 1 și n – unde n este număru de vârfuri din graf, iar muchiile cu [x,y] sau (x,y), unde x și y sunt vârfuri și se numesc extremitățile muchiei.
Un vecin al unui vârf x este orice vârf y cu proprietatea că există muchia [x,y].
Două vârfuri între care există muchie se numesc adiacente.
Două muchii sunt incidente dacă au o o extremitate comună. Un vârf este incident cu o muchie dacă vârful este extremitate a acelei muchii.
Mulțimea muchiilor are proprietatea de simetrie: dacă [x,y] este muchie, atunci și [y,x] este muchie.
Conform definiției:
- într-un graf neorientat nu există muchie de la un vârf la el însuși;
- intre două vârfuri distincte există cel mult o muchie.
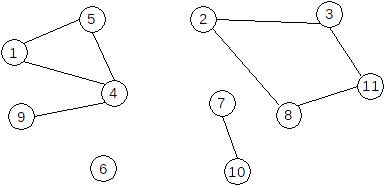
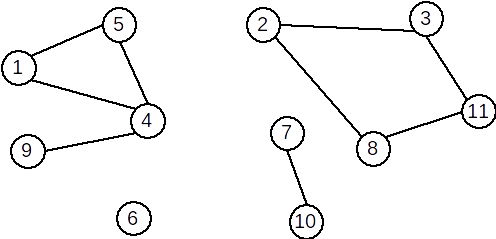
Exemplu: Fie G=(X,U), unde:
X={1,2,3,4,5,6,7,8,9,10,11}U={[1,4],[1,5],[2,3],[2,8],[3,11],[4,5],[4,9],[7,10],[8,11]}
Gradul unui vârf
Definiție Într-un graf neorientat se numește grad al unui vârf numărul de vârful adiacente cu acesta (sau numărul de muchii incidente cu acesta). Gradul unui vărf x se notează d(x) (degree).
Observații:
- un vârf cu gradul
0se numește izolat. În graful de mai sus, vârful6este izolat. - un vârf cu gradul
1se numește terminal. În graful de mai sus, vârful9este vârf terminal. - gradul maxim al unui vârf într-un graf cu
nvârfuri esten-1.
Teoremă: Într-un graf neorientat, suma gradelor tuturor vârfurilor este dublul numărului de muchii.
Consecințe:
- Suma gradelor tuturor vârfurilor este număr par.
- Într-un graf neorientat, numărul de vârfuri de grad impar este întotdeauna par.
Întrebare: Este posibil ca într-un grup de
5persoane, fiecare persoană să aibă exact3prieteni?
Reprezentarea grafurilor neorientate
Matricea de adiacență
Pentru un graf neorientat G=(X,U) cu n vârfuri, matricea de adiacență este o matrice cu n linii și n coloane și elemente din {0,1}, cu: \( A_{i,j} = \left\{ \begin{array}{ll}
1 & \mbox{dacă } [i,j] \in U \\
0 & \mbox{dacă } [i,j] \notin U \end{array} \right. \)
Exemplu: Pentru graful neorientat de mai jos avem următoarea matrice de adiacență:
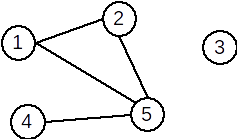 |
\( A = \left( \begin{array}{ccccc} 0 & 1 & 0 & 0 & 1 \\ 1 & 0 & 0 & 0 & 1 \\ 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 1 \\ 1 & 1 & 0 & 1 & 0 \end{array} \right) \) |
Observații:
- matricea de adiacență este simetrică față de diagonala principală;
- elementele de pe diagonala principală sunt
0; - gradul unui vârf
xeste egal cu numărul de elemente1de pe linia (sau coloana)x; - suma tuturor elementelor din matricea de adiacență a unui graf neorientat este egală cu dublul numărului de muchii din graf.
Lista de muchii
Lista de muchii a unui graf neorientat reprezintă o mulțime ce conține toate muchiile din graf.
Pentru graful alăturat, lista de muchii este:
\( U = \left\{ [1,2],[1,5],[2,5],[4,5] \right\} \)
Pentru reprezentarea în memorie putem folosi:
- un tablou unidimensional cu elemente de tip
struct {int I,J;} - două tablouri unidimensionale cu elemente de tip
int - o listă alocată dinamic
- etc.
Liste de adiacențe (de vecini)
Pentru un graf neorientat cu G=(X,U) se va memora numărul de vârfuri n și apoi, pentru fiecare vârf x, lista vârfurilor adiacente cu x, adică a vârfurilor y cu proprietatea că există muchia [x,y].
Pentru graful alăturat, listele de adiacență sunt:
1: 2 5 2: 1 5 3: vidă 4: 5 5: 1 2 4
La reprezentarea în memorie trebuie avut în vedere că dimensiunile listelor de vecini sunt variabile. De aceea, este neeficientă utilizarea unor tablouri alocate static. Astfel, putem folosi:
- un șir de
ntablouri unidimensionale alocate dinamic; - un șir de
nvectori din STL; - un șir de
nliste simplu (dublu) înlănțuite alocate dinamic.
Graf parțial. Subgraf. Graf complementar
Definiție. Fie G=(X, U) un graf neorientat. Se numeşte graf parțial al grafului G, graful neorientat G1=(X, U1), unde U1 ⊆ U.
Din definiție rezultă:
- Un graf parțial al unui graf neorientat
G=(V,U), are aceeaşi mulțime de vârfuri ca şiG, iar mulțimea muchiilor este o submulțime a luiUsau chiarU. - Fie
G=(X, U)un graf neorientat. Un graf parțial al grafuluiGse obține păstrând vârfurile şi
eliminând eventual nişte muchii (se pot elimina şi toate muchiile sau chiar nici una).
Definiție. Fie G=(X, U) un graf orientat. Se numeşte subgraf al grafului G graful neorientat G1=(X1,U1) unde X1 ⊆ X iar U1 conține toate arcele din U care au extremitățile în X1.
Din definiție rezultă:
- Fie
G=(X,U)un graf orientat. Un subgraf al grafuluiG, se obține ştergând eventual anumite
vârfuri şi odată cu acestea şi muchiile care le admit ca extremitate (nu se pot şterge toate vârfurile deoarece s-ar obține un graf cu mulțimea vârfurilor vidă).
Definiție. Fie G=(X, U) un graf neorientat. Se numeşte graf complementar al grafului G, graful neorientat G1=(X, U1), cu proprietatea că două vârfuri x și y sunt adiacente în G1 dacă și numai dacă nu sunt adiacente în G.
Exemplu:
| Graful inițial | Graf parțial | Subgraf | Graf complementar |
 |
 |
 |
 |
S-au eliminat muchiile [1,2], [3,1] |
S-a eliminat vârfurile 3 5 și toate muchiile incidente cu ele. |
O muchie [x,y] apare în graful complementar dacă și numai dacă nu apare în graful inițial. |
Observații. Un graf neorientat oarecare poate avea mai multe grafuri parțiale și subgrafuri, dar un unic graf complementar. Mai precis:
Teoremă: Fie G un graf neorientat cu n vârfuri și m muchii. Atunci:
- graful
Gadmite \( 2 ^ m \) grafuri parțiale; - graful
Gadmite \( 2 ^ n – 1 \) subgrafuri; - graful
Gadmite un unic graf complementar.
Justificare:
Să ne amintim că o mulțime cu a elemente are \( 2 ^ a \) submulțimi, inclusiv mulțimea vidă și mulțimea inițială. Atunci:
- orice submulțime a mulțimii muchiilor induce un graf parțial. Sunt
mmuchii, deci \( 2 ^ m \) submulțimi, deci \( 2 ^ m \) grafuri parțiale. - orice submulțime a mulțimii vârfuri induce un subgraf, mai puțin mulțimea vidă – un graf nu poate avea
0vârfuri. Similar ca mai sus, sunt \( 2^n – 1 \) subgrafuri. - graful complementar este unic determinat, deoarece complementara unei submulțimi față de o mulțime dată este unic determinată.
Graf nul. Graf complet. Graf regulat. Graf bipartit
Definiție: Un graf neorientat se numește graf nul dacă mulțimea muchiilor este vidă.
Într-un graf nul toate vârfurile sunt izolate.
Definiție. Fie G=(X, U) un graf neorientat. Graful G se numește graf complet dacă oricare două vârfuri
distincte ale sale sunt adiacente. Un graf complet cu n vârfuri se notează Kn.
Exemplu: Graful următor este graful K5.
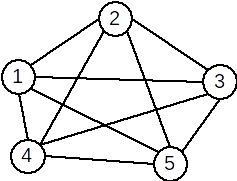
Într-un graf complet cu n vârfuri sunt \( C_n ^2 = { {n*(n-1)} \over 2 } \) muchii și fiecare vârf are gradul n-1.
Propoziție: Sunt \( 2 ^ {{n*(n-1)} \over 2} \) grafuri neorientate distincte cu n vârfuri.
Definiție: Un graf în care toate nodurile au acelaşi grad se numește graf regulat.
Exemplu: Graful de mai jos este regulat.
Definiţie: Un graf G=(X, U) se numește graf bipartit dacă există două mulţimi nevide A și B astfel încât X=A ∪ B, A ∩ B = ∅ şi orice muchie u a lui G are o extremitate în A iar cealaltă în B. Mulţimile A şi B formează o partiţie a lui X.
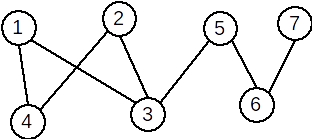
Exemplu: Graful următor este bipartit. A={1,2,5,7} și B={3,4,6}.
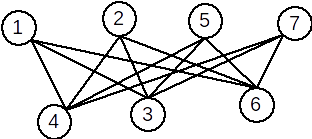
Definiție: Un graf bipartit G=(X,U) se numește bipartit complet dacă pentru oricare două vârfuri \( x \in A\) și \( y \in B \), există în graf muchia [x,y]; adică \( [x,y] \in U \).
Exemplu: Graful următor este bipartit complet.
Conexitate
Lanț, ciclu
Definiție: Se numește lanț o succesiune de vârfuri \( L = \left[ x_1, x_2, \cdots x_k \right] \) cu proprietatea că oricare două vârfuri consecutive sunt adiacente.
Vârfurile x1 şi xk se numesc extremitățile lanțului. Numărul k-1 se numește lungimea lanțului și este numărul de muchii din care este format.
Lanțul care conține numai vârfuri distincte, două câte două, este lanț elementar.
Lanțul care conține numai muchii distincte este lanț simplu. Dacă muchiile unui lanț nu sunt distincte se numește lanț compus.
Definiție: Se numește ciclu un lanț simplu în care primul vârf este identic cu ultimul. Dacă toate vârfurile sunt distincte, mai puțin primul și ultimul, se numește ciclu elementar.
Lungimea unui ciclu este egală cu numărul de muchii din ciclu. Lungimea minimă a unui ciclu este 3.
Un ciclu se numește par dacă lungimea sa este pară, respectiv impar în caz contrar.
Un graf neorientat care nu conține niciun ciclu se numește aciclic.
Exemple: În graful de mai jos:
- \( [2,4,1,3,5,7] \) este un lanț elementar
- \( [3,5,7,6,5,1] \) este un lanț neelementar, dar simplu
- \( [2,3,5,7,6,5,3,1] \) este un lanț compus
- \( [1,5,3,2,4,1] \) este un ciclu elementar
- \( [1,3,5,7,6,5,1] \) este un ciclu neelementar
Graf conex. Componente conexe
Definiție: Un graf neorientat se numește graf conex dacă pentru oricare două vârfuri x și y diferite ale sale, există cel puțin un lanț care le leagă, adică x este extremitatea inițială și y este extremitatea finală.
Un graf cu un singur nod este, prin definiție, conex.
Definiție: Se numește componentă conexă a unui graf G=(X,U) un subgraf H=(Y, V), conex, al lui G
care are proprietatea că nu există nici un lanț în G care să lege un vârf din Y cu un vârf din X – Y.
Subgraful H este conex și maximal cu această proprietate (dacă s-ar mai adăuga un vârf nu ar mai fi conex.)
Un graf este conex dacă admite o singură componentă conexă.
Exemple:
Graful următor este conex:
Graful următor nu este conex și are 4 componente conexe.
Definiție: Un graf este biconex dacă este conex şi pentru orice vârf eliminat subgraful generat îşi păstrează proprietatea de conexitate.
Arbore. Pădure
Definiție: Se numește arbore un graf conex și aciclic.
Exemplu: Graful următor este arbore:
Observații:
- Un arbore cu
nvârfuri aren-1muchii. - Un arbore este un graf conex și minimal cu această proprietate; dacă s-ar mai elimina o muchie, graful nu ar mai fi conex.
- Un arbore este un graf aciclic și maximal cu această proprietate; dacă s-ar mai adăuga o muchie, s-ar obține un ciclu.
Un graf parțial care este arbore se numește arbore parțial.
Un graf care nu conține cicluri se mai numește pădure. Într-o pădure fiecare componentă conexă este arbore.
Graf hamiltonian. Graf eulerian
Definiție: Se numește graf hamiltonian un graf care conține un ciclu hamiltonian. Se numește ciclu hamiltonian un ciclu elementar care conține toate vârfurile grafului.
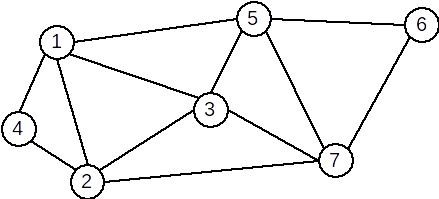
Exemplu: Graful următor este hamiltonian. Un ciclu hamiltonian este: \( [1,4,2,3,7,6,5,1] \)
Teoremă: Un G un graf neorientat. Dacă are n≥3 vârfuri şi gradul oricărui vârf verifică inegalitatea d(x)≥n/2 atunci G este hamiltonian.
Definiție: Se numește graf eulerian un graf care conține un ciclu eulerian. Se numește ciclu eulerian un ciclu care conține toate muchiile grafului.
Exemplu: Graful următor este eulerian. Un ciclu eulerian este: \( [1,4,2,1,3,2,7,3,5,7,6,5,1] \)
Teoremă: Un graf G = (X,U), fără vârfuri izolate, este eulerian dacă şi numai dacă este conex şi
gradele tuturor vârfurilor sale sunt numere pare.
Grafuri orientate
Definiții
Definiție. Se numeşte graf orientat sau digraf o pereche ordonată de mulțimi notată G=(V, U), unde:
Veste o mulțime finită şi nevidă ale cărei elemente se numesc noduri sau vârfuri;Ueste o mulțime de perechi ordonate de elemente distincte dinVale cărei elemente se numesc arce.
Exemplu:
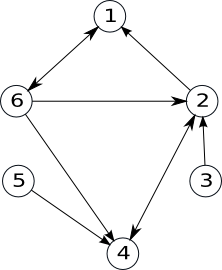
V={1,2,3,4,5,6}
U={(1,6),(2,1),(2,4),(3,2),(4,2),(5,4),(6,1),(6,2),(6,4)}
Observăm că arcele (1,6) și (6,1) sunt distincte.
Noțiuni
- extremități ale unui arc: pentru arcul
u=(x,y), se numesc extremități ale sale nodurilexşiy;xse numeşte extremitate inițială;yse numeşte extremitate finală;yse numește succesor al luix;xse numește predecesor al luiy.
- vârfuri adiacente: dacă într-un graf există arcul
u=(x,y)(sauu=(y,x), sau amândouă), se spune despre nodurilexşiycă sunt adiacente; - incidență:
- dacă
u1şiu2sunt două arce ale aceluiaşi graf, se numesc incidente dacă au o extremitate comună. Exemplu:u1=(x,y)şiu2=(y,z)sunt incidente; - dacă
u1=(x,y)este un arc într-un graf, se spune despre el şi nodulx, sau noduly, că sunt incidente.
- dacă
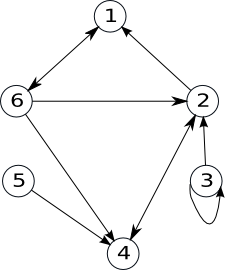
Definiții alternative
Definiție. Se numeşte graf orientat o pereche ordonată de mulțimi notată G=(V, U), unde:
Veste o mulțime, finită şi nevidă, ale cărei elemente se numesc noduri sau vârfuri;Ueste o mulțime, de perechi ordonate de elemente dinV, ale cărei elemente se numesc arce.
Această definiție diferă de prima definiție prin faptul ca acum nu se mai spune despre extremitățile unui arc
ca trebuie să fie distincte. În baza acestei definiții, sunt permise şi arce de genul: u=(x,x) unde x∈V; aceste arce se numesc bucle.
Exemplu:
Definiție. Se numeşte graf orientat o pereche ordonată de mulțimi notată G=(V, U), unde:
Veste o mulțime, finită şi nevidă, ale cărei elemente se numesc noduri sau vârfuri;Ueste o familie de perechi ordonate de elemente dinV, numită familia de arce.
Această definiție diferă de cea anterioară prin faptul ca acum nu numai că se admit bucle, dar se admit şi mai multe arce identice.
Exemplu:
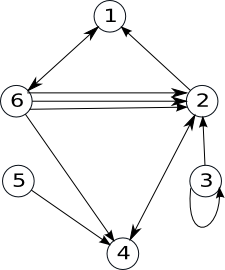
Observăm că există trei arce (6,2).
Observație. Dacă într-un graf orientat numărul arcelor identice nu depăşeşte numărul p, atunci se numeşte p-graf. Graful de mai sus este un 3-graf.
Grade
Definiție. Fie G=(V, U) un graf orientat și x un nod al său.
- Se numeşte grad exterior al nodului
x, numărul arcelor de forma(x,y)(adică numărul arcelor care ies dinx), notatd+(x). - Se numeşte grad interior al nodului
x, numărul arcelor de forma(y,x)(adică numărul arcelor care intră înx), notatd-(x).
Exemplu:
Pentru graful alăturat:
d+(2)=2d-(2)=3
Teoremă: Într-un graf orientat, suma gradelor exterioare a tuturor nodurilor este egală cu suma gradelor interioare a tuturor nodurilor și cu numărul de arce.
Un nod x se numește izolat dacă d+(x)=d-(x)=0 (are gradul interior și gradul exterior egal cu 0).
Reprezentarea grafurilor orientate
Matricea de adiacență
Fie G=(V,U) un graf orientat cu n noduri, în care nu există mai multe arce de la un nod la altul. Matricea de adiacență a grafului este o matrice cu n linii și n coloane și elemente 0 sau 1, astfel:
Ai,j=1dacă există arcul(i,j)Ai,j=0dacă nu există arcul(i,j)
Pentru graful alăturat, matricea de adiacență este:
0 0 0 0 0 1 1 0 0 1 0 0 0 1 0 0 0 0 0 1 0 0 0 0 0 0 0 1 0 0 1 1 0 1 0 0
Observăm că matricea de adiacență:
- are zerouri pe diagonală (dacă în graf nu avem bucle)
- nu trebuie să fie simetrică față de diagonala principală
Pentru reprezentarea în memorie vom folosi un tablou bidimensional ale cărui dimensiuni sunt în concordanță cu numărul de noduri din graf.
Considerăm un graf cu maxim 50 de noduri. În C/C++ vom avea declarația:
int A[51][51];
Lista de arce
Lista de arce a unui graf orientat reprezintă o mulțime (familie, dacă arcele se pot repeta) ce conține toate arcele din graf.
Pentru graful alăturat, lista de arce este:
U={(1,6),(2,1),(2,4),(3,2),(4,2),(5,4),(6,1),(6,4)}
Pentru reprezentarea în memorie putem folosi:
- un tablou unidimensional cu elemente de tip
struct {int I,J;} - două tablouri unidimensionale cu elemente de tip
int - o listă alocată dinamic
- etc.
Listele de adiacență (succesori)
Pentru un graf orientat cu G=(V,U) se va memora numărul de noduri n și apoi, pentru fiecare nod x, lista succesorilor lui x, adică nodurilor y cu proprietatea că există arcul (x,y).
Pentru graful alăturat, acestea sunt:
1: 6 2: 1 4 3: 2 4: 2 5: 4 6: 1 2 4
La reprezentarea în memorie trebuie avut în vedere că dimensiunile listelor de succesori sunt variabile. De aceea, este neeficientă utilizarea unor tablouri alocate static. Astfel, putem folosi:
- un șir de
ntablouri unidimensionale alocate dinamic; - un șir de
nvectori din STL; - un șir de
nliste simplu (dublu) înlănțuite alocate dinamic.
Graf parțial, subgraf
Definiție. Fie G=(V, U) un graf orientat. Se numeşte graf parțial al grafului G, graful orientat G1=(V, U1), unde U1 ⊆ U.
Din definiție rezultă:
- Un graf parțial al unui graf orientat
G=(V,U), are aceeaşi mulțime de vârfuri ca şiG, iar mulțimea arcelor este o submulțime a luiUsau chiarU. - Fie
G=(V, U)un graf orientat. Un graf parțial al grafuluiG, se obține păstrând vârfurile şi
eliminând eventual nişte arce (se pot elimina şi toate arcele sau chiar nici unul).
Definiție. Fie G=(V, U) un graf orientat. Se numeşte subgraf al grafului G graful orientat G1=(V1,U1) unde V1 ⊆ V iar U1 conține toate arcele din U care au extremitățile în V1.
Din definiție rezultă:
- Fie
G=(V,U)un graf orientat. Un subgraf al grafuluiG, se obține ştergând eventual anumite
vârfuri şi odată cu acestea şi arcele care le admit ca extremitate (nu se pot şterge toate vârfurile deoarece
s-ar obține un graf cu mulțimea vârfurilor vidă).
Exemplu:
| Graful inițial | Graf parțial | Subgraf |
 |
 |
 |
S-au eliminat arcele (1,6), (3,2), (6,4) |
S-a eliminat nodul 6 și toate arcele incidente cu el. |
Graf complet. Graf turneu.
Definiție. Fie G=(V, U) un graf orientat. Graful G se numește graf complet dacă oricare două vârfuri
distincte ale sale sunt adiacente.
Două vârfuri x și y sunt adiacente dacă:
- între ele există arcul
(x,y), sau - între ele există arcul
(y,x), sau - între ele există arcele
(x,y)şi(y,x).
Exemplu:
Teoremă: Numărul de grafuri orientate complete cu n noduri este 3n*(n-1)/2.
Definiție: Un graf orientat este turneu, dacă oricare ar fi două vârfuri i şi j, i≠j, între ele există un singur arc: arcul (i,j) sau arcul (j,i).
Exemplu:
Proprietăți:
- Orice graf turneu este graf complet.
- Avem
2n*(n-1)/2grafuri turneu cunnoduri. - În orice graf turneu există un drum elementar care trece prin toate vârfurile grafului.
Conexitate
Lanț. Drum
Definiție: Fie G=(V, U) un graf orientat. Se numește lanț, în graful G, o succesiune de arce, notată
L = (u1 , u2 ,..., uk) cu proprietatea ca oricare două arce consecutive au o extremitate comună (nu are importanță orientarea arcelor).
sau
Definiție: Fie G=(V, U) un graf orientat. Se numește lanț, în graful G, o succesiune de noduri, notată
L = (x1 , x2 ,..., xp) cu proprietatea ca oricare două noduri consecutive sunt adiacente.
Lungimea unui lanț este egală cu numărul de arce din care este alcătuit.
Primul nod și ultimul nod dintr-un lanț formează extremitățile lanțului.
Definiție. Fie G=(V, U) un graf orientat. Se numește drum în graful G o succesiune de noduri, notată
D = (x1 , x2 ,..., xk), cu proprietatea că pentru orice 1≤i<k, (xi,xi+1) este arc în G.
Lungimea unui drum este egală cu numărul de arce din care este alcătuit.
Pentru un drum D = (x1 , x2 ,..., xk), nodurile x1 și xk reprezintă extremitățile – inițială, respectiv finală.
Un lanț (drum) se numește elementar dacă în el nu se repetă noduri. Un lanț (drum) se numește simplu dacă în el nu se repetă arce.
Exemple În graful alăturat:
L=(5,4,2,6,1) este un lanț elementar, dar nu este drum.
D=(3,2,1,6,4) este drum elementar.
D=(3,2,1,6,2,4) este drum neelementar, dar simplu.
Circuit
Definiție: Se numește circuit un drum simplu în care extremitatea inițială și finală sunt egale. Se numește circuit elementar un circuit în care, cu excepția extremităților, nu se repetă noduri.
Lungimea unui circuit este reprezentată de numărul de arce din care acesta este alcătuit.
Exemple În graful alăturat:
(1,6,2,1) și (1,6,4,2,1) sunt circuite elementare.
Conexitate. Tare conexitate
Definiții: Fie G=(V,U) un graf orientat.
Graful se numește tare conex dacă între oricare două noduri distincte există cel puțin un drum.
Se numește componentă tare conexă un subgraf tare conex și maximal cu această calitate – dacă am mai adauga un nod, n-ar mai fi tare conex.
Exemplu:

Graful de mai sus nu este tare conex. El conține trei componente tare conexe:
1 3 425 6 7 8
Observație: Un nod al grafului face parte dintr-o singură componentă tare conexă. Dacă ar face parte din două compoennte tare conexe, ele s-ar “reuni” prin intermediul acelui nod.
Acest articol conține mai multe detalii despre tare-conexitate (algoritmi de verificare a tare conexității, de determinare a componentelor tare-conexe, etc.).
Graf hamiltonian. Graf eulerian
Definiții: Fie un graf orientat G=(V,U).
Un drum elementar care conține toate nodurile grafului se numește drum hamiltonian.
Un circuit elementar care conține toate nodurile grafului se numește circuit hamiltonian.
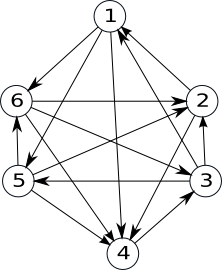
Un graf care conține un circuit hamiltonian se numește graf hamiltonian.
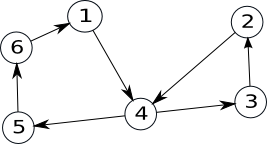
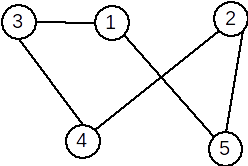
Exemplu: Graful orientat desenat mai jos este hamiltonian, deoarece conține circuitul hamiltonian (2, 1, 5 , 6, 4, 3, 2).
Definiții: Fie un graf orientat G=(V,U).
Un drum care conține toate arcele grafului se numește drum eulerian.
Un circuit care conține toate arcele grafului se numește circuit eulerian.
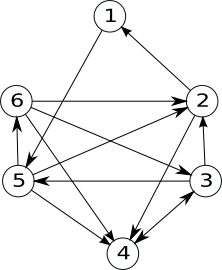
Un graf care conține un circuit eulerian se numește graf eulerian.
Teoremă: Un graf fără noduri izolate este eulerian dacă și numai dacă este conex și pentru fiecare nod, gradul interior este egal cu cel exterior.
Exemplu: Graful orientat de mai jos este eulerian.